
概述
在对安川机器人进行手动运行或示教编程时会用到众多的坐标系,如关节坐标系、直角坐标系、圆柱坐标系、工具坐标系、用户坐标系、示教线坐标系。其中,工具坐标系和用户坐标系需要用户根据实际情况进行自主标定。本期,先来介绍下在MotoSimEG-VRC软件中机器人用户坐标系的标定方法。
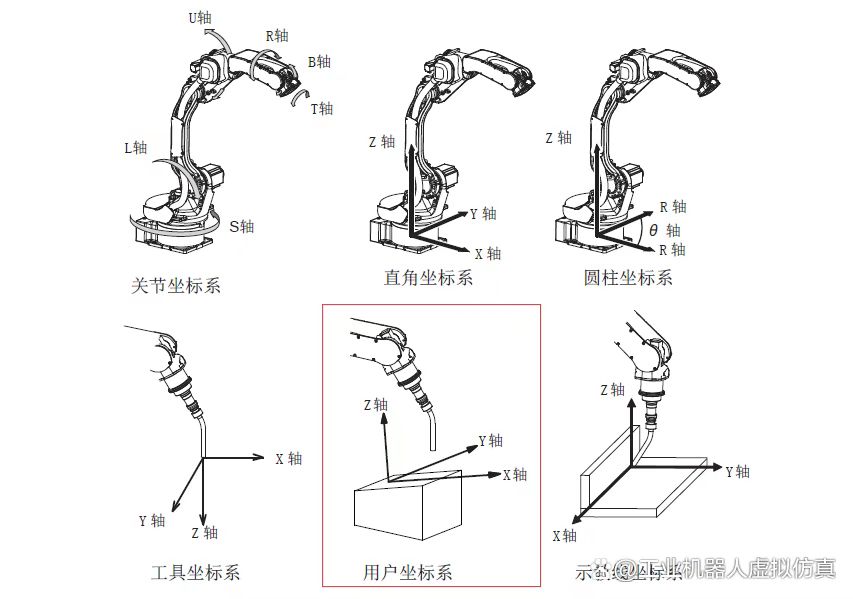
用户坐标系标定就是将机器人运动区域中的任意位置标定为任意角度的XYZ直角坐标系。这样,机器人在运动时其TCP就会平行于这些标定的用户坐标系的坐标轴。
安川机器人的用户坐标系最多可标定63个,分别对应为1~63的用户坐标系编号,这些有固定编号的用户坐标系也被称之为用户坐标文件。
在手动运行机器人和示教编程时,若使用用户坐标系,则各种运动或示教编程将会变得非常简单。例如,在有多个夹具台的工作站中,标定了用户坐标系后,机器人手动操作会变得更容易;进行码垛作业时,如果在托盘上标定了用户坐标系,那么就可以使机器人平移时位移增量的设定变得更容易;在机器人与输送带同步运动时,还可以通过标定用户坐标系来指定输送带的运动方向。
用户坐标系标定方法
在MotoSimEG-VRC软件中也内置了专门的机器人用户坐标系标定功能,可以直接在模型上标定用户坐标系,并将标定好的坐标系自动同步到机器人虚拟控制器中。
在软件“Controller”菜单栏下的“FileSettings”命令组中,点击“User frame”命令按钮,弹出Set User frame对话框,在此对话框中可以标定机器人的用户坐标系。
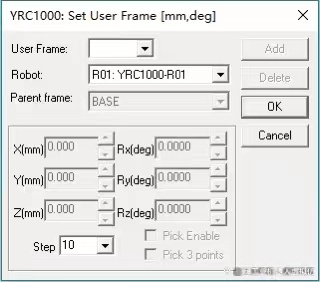
Set User frame对话框中各个功能选项的详细介绍如下所示:
User frame:设定要标定的用户坐标系编号。
Robot:选择要标定用户坐标系的机器人。
Parentframe:选择用来标定用户坐标系的父级参考坐标系,用户坐标系是在父级参考坐标系的基础上进行标定的,可选择的父级参考坐标系包含“base坐标系”和“USER坐标系”两种,此功能选项仅在YRC1000、YRC1000micro类型的控制器上显示。
坐标区:显示与调整用户坐标系的坐标值。
Pick Enable:启用拾取功能,启用后可通过鼠标单击拾取点的方法来标定用户坐标系。
Pick 3points:启用拾取3点法标定用户坐标系,启用后鼠标单击拾取的第1点为用户坐标系原点,拾取的第2点与第1点用来确定用户坐标系X轴方向,拾取的第3点与前两点共同确定用户坐标系XY轴所在的平面。
Step:设定用于调整坐标值的增量值。
在Set User frame对话框中,首先在User frame后选择要标定的用户坐标系编号,如UF#1。然后点击“Add”按钮,添加当前用户坐标系标定。此时,对话框中的坐标区域、拾取功能等被激活。同时,在软件工作区出现默认生成的用户坐标系模型。
勾选“Pick3points”功能选项,然后鼠标在工装或工件模型上点选第1点,点选后的对应位置处会出现黄色“*”标;再点选第2点,点选位置处出现蓝色“*”标;最后点选第3点,点选位置处出现红色“*”。这时,默认生成的用户坐标系模型移动到3点确定的标定位置处,SetUserframe对话框的坐标区内也出现用户坐标系的当前位置数据。
点击“OK”按钮,弹出“用户坐标系已更改,是否覆盖数据文件?”的信息提示框,点击“是”,用户坐标系标定完成。
当然,标定时也可以直接在用户坐标区输入坐标值进行标定,或通过启用“Pick Enable”功能的方式进行拾取点标定。
用户坐标系标定注意事项
在具有多种机器人控制器的工作站中,必须先选择要标定用户坐标系的控制器,然后再进行用户坐标系标定。
打开Set User frame对话框后,可通过按“Shift”键来切换启用和禁用“Pick Enable”与“Pick 3points”功能选项。
主工具的用户坐标系只能进行数据编辑,无法通过“Userframe”命令来新建主工具的用户坐标系。当选择现有的主工具用户坐标系时,Set User frame对话框中的机器人名称为灰色。
通过“User frame”命令生成的用户坐标系仅适用于虚拟仿真软件,在虚拟示教器中标定的用户坐标系可用于真实机器人。
加载到控制器以更改DX200上的用户坐标格式时,偶尔出现代码为3140的错误。在这种情况下,需要删除“uframe.cnd”文件中的“///BASICFRM”和“///baseP”两行语句,保存后再重新加载到控制器。
用户坐标系标定检查
通过“User frame”命令标定好的用户坐标系会直接同步到机器人虚拟控制器中,并且可以在虚拟示教器中查看和使用。
打开机器人虚拟示教器,然后依次点击“MainMenu”→“ROBOT”→“USERCOORDINATE”,打开USERCOORDINATE界面,在其中可以看到编号为01的用户坐标系变为“已设置”状态。操作人员可切换到此用户坐标系,然后对机器人进行手动操作或示教编程。